|
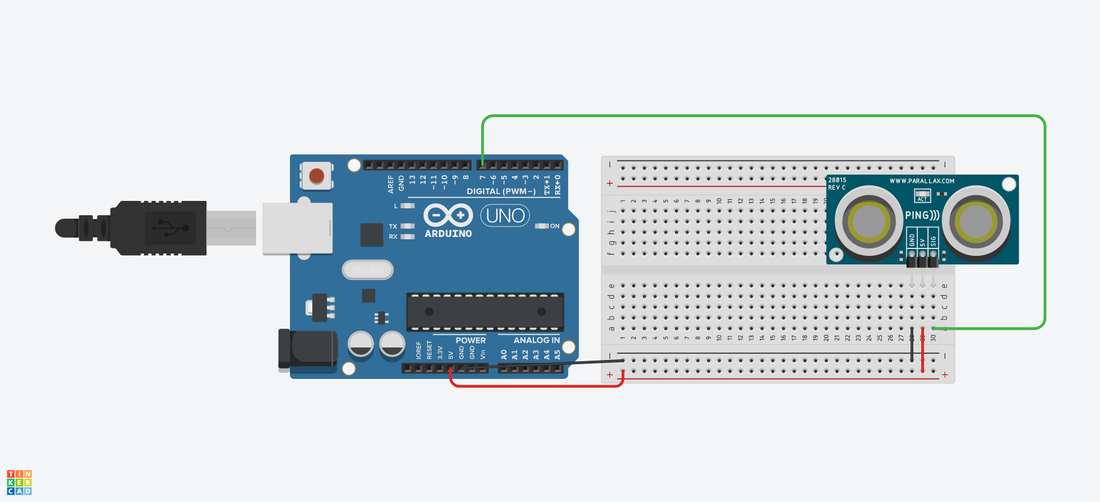
const int pingPin = 7;
void setup() {
Serial.begin(9600);
}
void loop() {
long duration, inches;
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
inches = microsecondsToInches(duration);
Serial.print(inches);
Serial.print("in, ");
Serial.println();
delay(100);
}
long microsecondsToInches(long microseconds) {
return microseconds / 74 / 2;
}
|
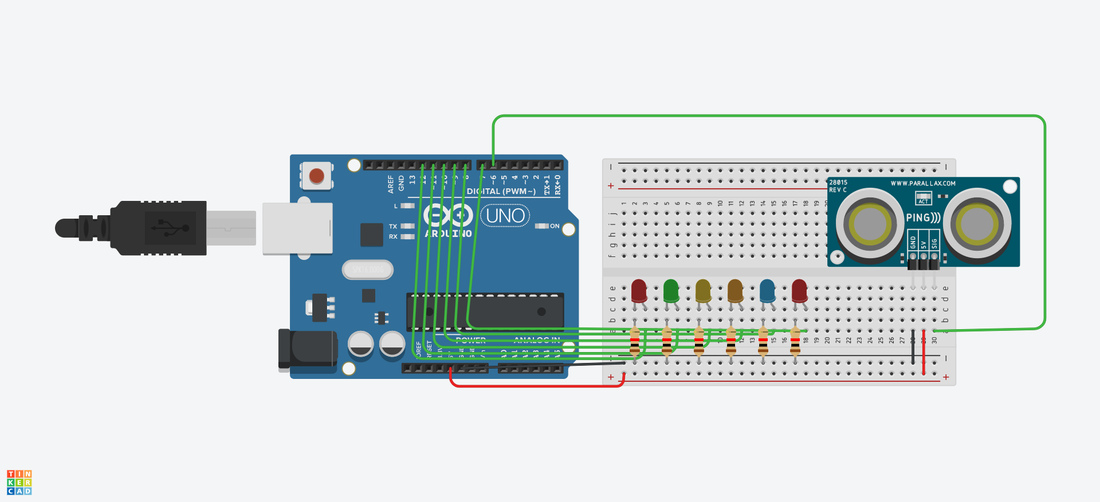
Ping Sensor Mod
|
const int pingPin = 6;
int ledPin1 = 12;
int ledPin2 = 11;
int ledPin3 = 10;
int ledPin4 = 9;
int ledPin5 = 8;
int ledPin6 = 7;
long microsecondsToInches(long microseconds) {
return microseconds / 74 / 2;
}
void setup(){
pinMode( ledPin1, OUTPUT );
pinMode( ledPin2, OUTPUT );
pinMode( ledPin3, OUTPUT );
pinMode( ledPin4, OUTPUT );
pinMode( ledPin5, OUTPUT );
pinMode( ledPin6, OUTPUT );
}
void loop() {
long duration, inches;
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(2);
digitalWrite(pingPin, LOW);
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
inches = microsecondsToInches(duration);
Serial.print(inches);
Serial.print("in, ");
Serial.println();
delay(50);
if (inches > 120){
digitalWrite (ledPin6, HIGH);
}
else if (inches > 100){
digitalWrite (ledPin5, HIGH);
}
else if (inches > 80){
digitalWrite (ledPin4, HIGH);
}
else if (inches > 60){
digitalWrite (ledPin3, HIGH);
}
else if (inches > 40){
digitalWrite (ledPin2, HIGH);
}
else if (inches > 20){
digitalWrite (ledPin1, HIGH);
}
else {
digitalWrite(ledPin6, LOW);
digitalWrite(ledPin5, LOW);
digitalWrite(ledPin4, LOW);
digitalWrite(ledPin3, LOW);
digitalWrite(ledPin2, LOW);
digitalWrite(ledPin1, LOW);
delay(10);
}
}
|
